")

Product Introduction:
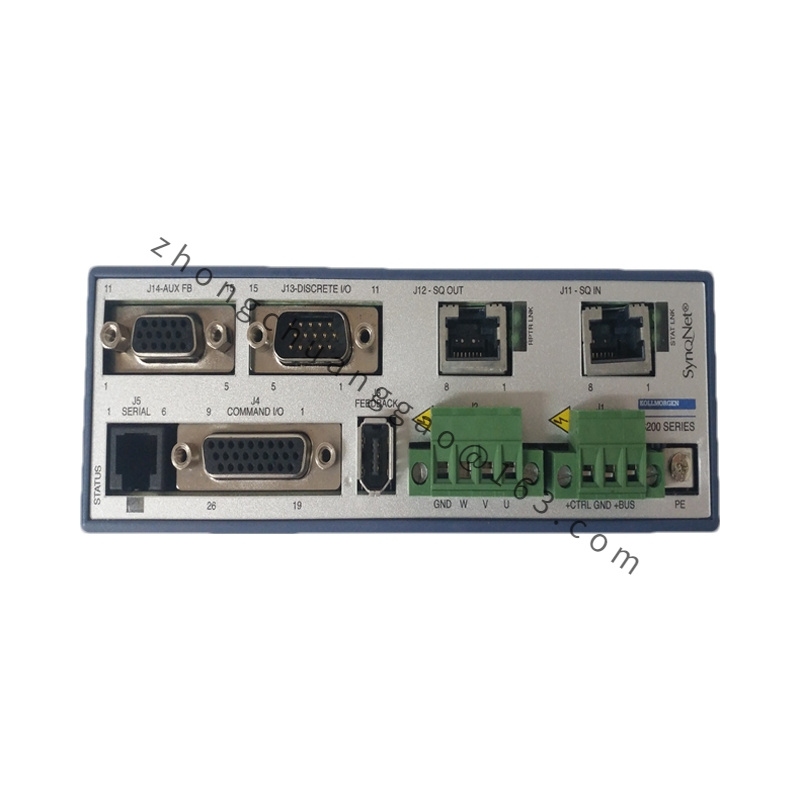
The F45HMNA-R2-NS-NV-00 is a frameless brushless DC servo motor from Kollmorgen’s F-Series product line. The “45” denotes a 45 mm outer diameter stator, “HM” indicates high-magnet configuration, “NA” specifies the winding type, and the suffix codes define specific mechanical and electrical options. This motor is engineered for direct-drive applications demanding high torque density, smooth cogging-free operation, and long service life.
Key Specifications:
| Parameter | Value |
|---|---|
| Outer Diameter (Stator) | 45 mm (1.77 in) |
| Inner Diameter (Bore) | 22 mm (0.87 in) |
| Stack Length | 32 mm (1.26 in) |
| Continuous Torque | 0.8 Nm (typical) |
| Peak Torque | 2.4 Nm (typical) |
| Rated Speed | 5000 RPM (typical) |
| Rated Voltage | 24 VDC (nominal) |
| Phase Resistance | 2.8 Ω (typical, 20°C) |
| Phase Inductance | 0.8 mH (typical) |
| Torque Constant (Kt) | 0.12 Nm/A (typical) |
| Back-EMF Constant (Ke) | 11.4 V/krpm (typical) |
| Pole Count | 8 poles |
| Rotor Inertia | 12 g·cm² (typical) |
| Weight | Approximately 0.28 kg (0.62 lb) |
| Thermal Resistance (Rth) | 4.5 °C/W |
| Feedback | Hall sensors (3-phase, 120° spacing) |
| Insulation Class | Class H (180°C) |
Code Breakdown (F45HMNA-R2-NS-NV-00):
| Code Segment | Meaning |
|---|---|
| F45 | F-Series, 45 mm stator OD |
| H | High-energy magnet (NdFeB N42SH) |
| M | Metric winding configuration |
| N | Standard insulation class |
| A | Winding variant A |
| R2 | Revision level 2 |
| NS | No shaft (frameless), standard bore |
| NV | No connector, flying leads |
| 00 | Standard configuration, no special options |
Structural Features:
Functional Features:
Applicable Industries:
Installation Requirements:
Usage Notes:



.jpg)




{kind=link}
{kind=link}