")

Rated Continuous Torque: 2.28 Nm
Peak Torque: 9.12 Nm
Rated Speed: 3000 RPM
Max Speed: 6000 RPM
Supply Voltage: 48 VDC (Nominal DC Bus)
Continuous Current: 14.6 A (RMS)
Peak Current: 58.4 A
Motor Frame Size: S606 (115 mm Flange)
Motor Length: 600 Series (Standard Stack Length)
Encoder Type: Single-Turn Absolute, 12-Bit Resolution (4096 Counts/Rev)
Encoder Interface: BiSS-C / EnDat 2.2 (Configurable)
Feedback Device Model: Integrated with motor, 63032 Series Encoder
Rotor Inertia: 0.00039 kg·m² (39 g·cm²)
Weight: Approx. 2.1 kg (Motor Only)
Stator Construction: Slotless Ironless (Cylindrical Winding)
Magnets: Neodymium (NdFeB) Permanent Magnets, High-Energy Grade
Housing Material: Anodized Aluminum Alloy (6061-T6)
Shaft Type: Smooth Shaft with Keyway (Standard Configuration)
Bearing Type: Angular Contact Ball Bearings (Front & Rear)
Insulation Class: Class H (180°C)
IP Rating: IP65 (with Connector), IP40 (Motor Body Only)
Operating Temperature Range: -20°C to +80°C (Continuous), -40°C to +100°C (Short-Term)
Cooling Method: Conduction Cooling (Housing Mount), Optional Forced Air
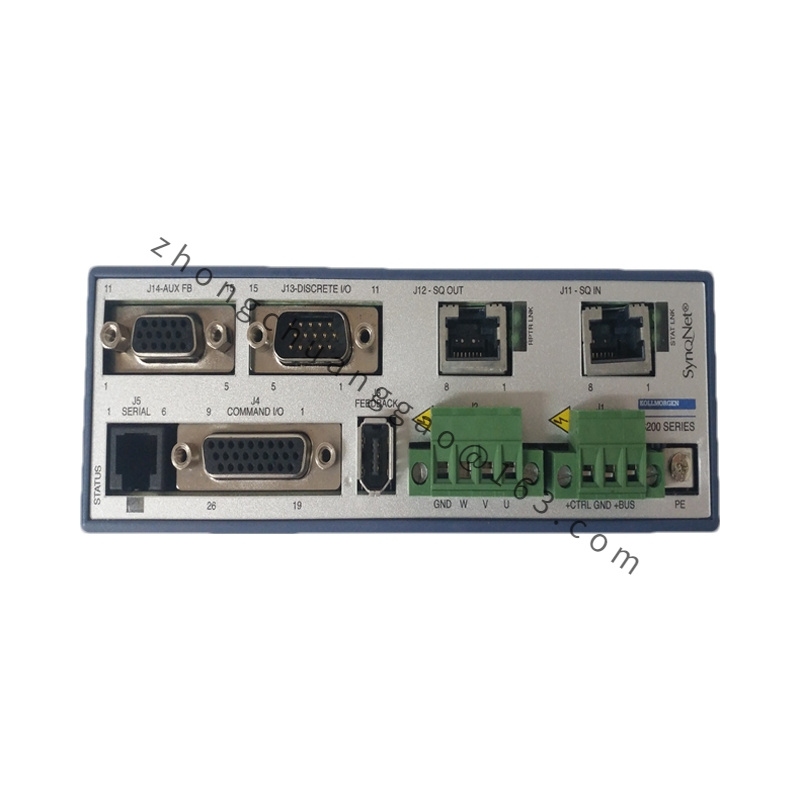
Communication Interface: EtherCAT (Primary), CANopen (Secondary)
Compatible Drive Series: AKD Series (AKD-P024, AKD-B024, AKD-T024, AKD-S024)
Key Features:
Applicable Industries: Semiconductor Manufacturing, Medical Robotics, Laboratory Automation, Aerospace Actuation, Precision Packaging
Installation Requirements:
Usage Notes:


.jpg)






{kind=link}
{kind=link}