")

Digital guide
You are here:
- Home
- Kollmorgen
- Kollmorgen CB06561
Kollmorgen CB06561
Product Overview
Compact single-axis digital servo amplifier engineered for low-to-medium precision motion control, designed to pair with Kollmorgen small-frame AKM & 6SM series permanent magnet synchronous servo motors. Adopts full digital vector FOC control architecture for closed-loop position, speed and torque regulation, built for space-restricted OEM automation equipment.
Detailed content
Core Technical Specifications
- Input Power Rating: Single-phase 200–240 VAC, 50/60 Hz
- Rated Continuous Output Current: 4 Arms
- Peak Output Current: 8 Arms (3-second 150% overload capacity)
- Nominal Rated Power Output: 400 W
- DC Bus Operating Voltage: Max 400 VDC
- Control Loop Cycle Times: Current loop 1 μs; Speed loop 100 μs; Position loop 200 μs
- Position Feedback Resolution Support: Up to 23-bit absolute encoder
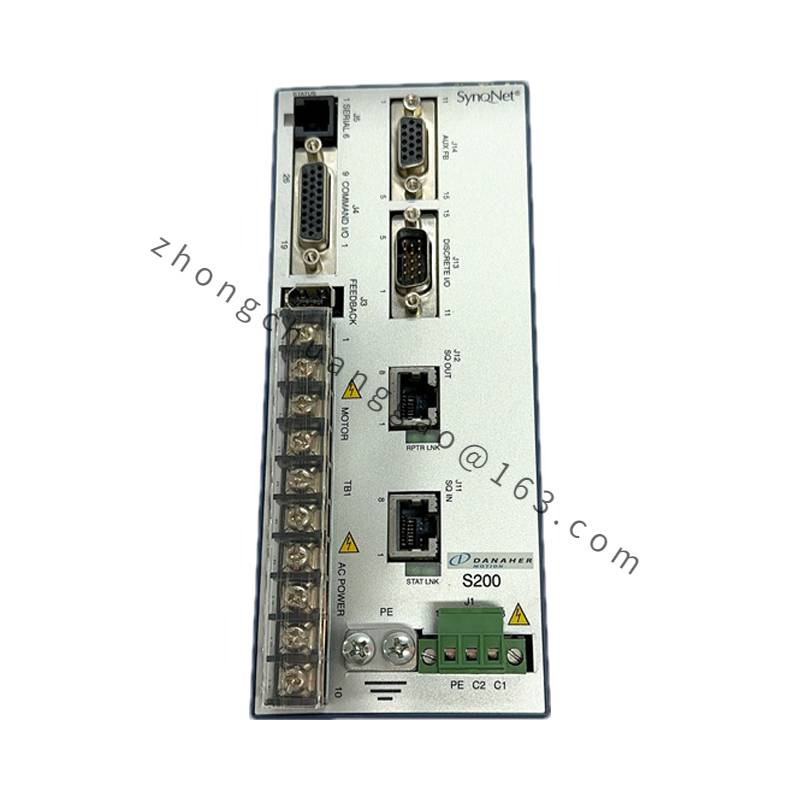
- Communication Interfaces: RS-232 debug port, CANopen (CiA402 protocol), analog ±10V command interface, pulse/direction digital input
- Physical Dimensions: 213 mm (W) × 100 mm (H) × 60 mm (D)
- Net Weight: 1.5 kg
- Environmental Rating: IP20 enclosure protection; Operating temperature 0°C ~ +40°C; Storage temperature -25°C ~ +70°C; Max operating altitude 1000 m (6% power derate per additional 1000 m)
Function Features
- Three standard control modes: Position loop, Velocity loop, Torque loop
- Built-in electronic gearing, cam profile generation, homing sequence logic
- Multi-layer hardware protection circuit: Overcurrent, overvoltage, undervoltage, overheat, phase loss, short-circuit, motor stall, encoder fault
- Auto motor parameter identification function for one-click gain tuning
- 16-channel digital input / 8-channel digital output isolated terminal block
- Compatible with incremental encoders, resolvers, SFD smart feedback sensors
- Embedded brake chopper for regenerative energy dissipation
Performance Highlights
- 1 kHz speed loop bandwidth delivers ultra-fast dynamic response
- Noise suppression algorithm eliminates low-frequency mechanical resonance
- Standard CANopen bus enables multi-axis synchronous linkage without external controllers
- Small footprint DIN rail mounting minimizes cabinet space occupation
Material & Structural Characteristics
- Main heat sink: Extruded black aluminum alloy with vertical fin cooling channel
- Outer housing: Flame-retardant ABS plastic front panel
- Terminal connectors: Copper alloy gold-plated contacts for long-term oxidation resistance
- Internal PCB: FR-4 high-temperature resistant substrate with conformal coating
- Mounting structure: Standard 35 mm DIN rail clamping buckle, rear wall mounting screw holes
Working Principle
AC mains input undergoes full-wave rectification to form DC bus voltage; DSP digital processor executes FOC field-oriented control algorithm to output three-phase sinusoidal PWM drive signals to servo motor stator windings. Encoder real-time position feedback forms triple closed-loop control (current-speed-position) to adjust PWM duty cycle dynamically, realizing precise motion trajectory tracking. Regenerative energy from motor deceleration is consumed via internal braking resistor.
Applicable Industries
Small packaging machinery, laboratory automation equipment, PCB micro-positioning stages, textile textile machinery, small laser processing equipment, medical automation test benches, semiconductor micro-handling modules
Installation Requirements
- Mount vertically on standard 35 mm DIN rail inside IP54+ electrical cabinet
- Maintain minimum 50 mm vertical clearance above/below drive for heat convection
- Separate power wiring and encoder signal wiring with shielded cable, minimum 10 cm routing distance
- Earth ground terminal must connect to cabinet PE ground with 4 mm² copper wire
- Ambient relative humidity limited to 5%–85% non-condensing
Operation Precautions
- Power-on sequence: Supply control power first, then main power; power-off sequence reversed
- Complete motor auto-tuning before formal load operation
- Do not disconnect encoder cable while drive is energized
- Avoid operation in dusty, corrosive gas or high-vibration environments
- Perform annual insulation resistance test for power terminals to prevent leakage failure








{kind=link}
{kind=link}