")

Digital guide
You are here:
- Home
- Kollmorgen
- Kollmorgen AKD-T01206-ICA
Kollmorgen AKD-T01206-ICA
Model Series: AKD Series (Advanced Kinetic Drives)
Product Introduction:
The AKD-T01206-ICA is a single-axis digital servo drive from the AKD product family. The model code decodes as: T = standard AKD frame, 012 = 12 A continuous current rating, 06 = 600 VDC bus voltage rating, ICA = configuration code (indicates specific I/O, feedback, and communication options). The AKD platform is Kollmorgen’s flagship servo drive for high-performance motion control.
Detailed content
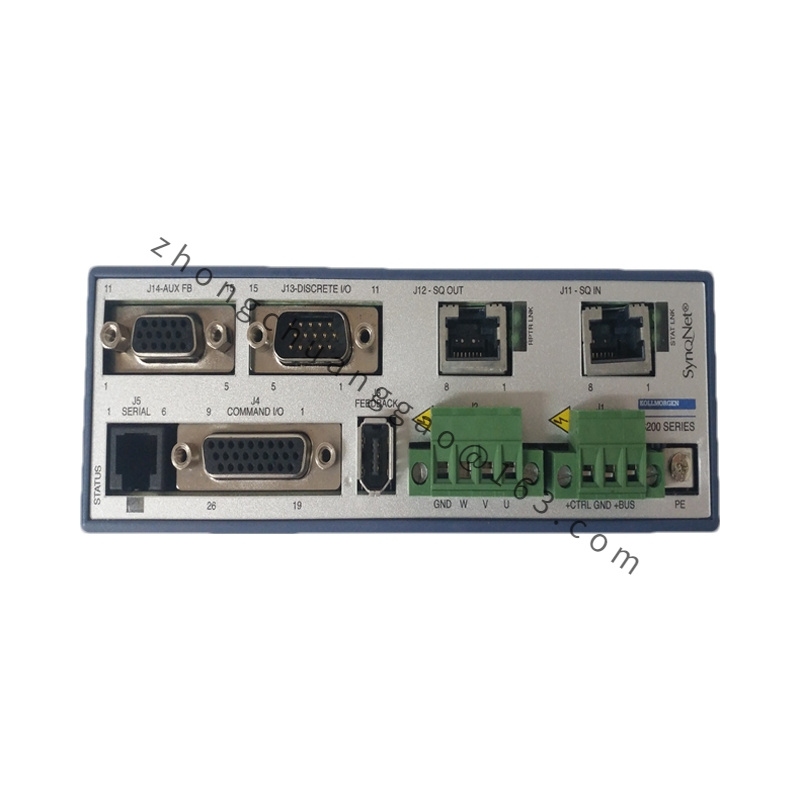
Technical Specifications:
| Parameter | Value |
|---|---|
| Drive Type | Single-Axis Digital Servo Drive (Sinusoidal Commutation) |
| Continuous Output Current | 12 A RMS per phase |
| Peak Output Current | 36 A peak (3x continuous, 10-second rating) |
| Bus Voltage | 480 VAC to 600 VDC (nominal 540 VDC bus) |
| PWM Switching Frequency | 16 kHz (adjustable 8-16 kHz) |
| Position Loop Update Rate | 1 kHz (standard), up to 4 kHz with option |
| Velocity Loop Update Rate | 1 kHz |
| Current Loop Update Rate | 16 kHz |
| Command Interfaces | Analog ±10V, Pulse & Direction (up to 4 MHz), Step & Direction, EtherCAT, PROFINET, EtherNet/IP, Modbus TCP |
| Feedback Support | Sin/Cos Encoder (up to 20-bit), Resolver (ASI or native), Hiperface DSL, EnDat 2.2, BiSS-C, Incremental (up to 16-bit) |
| Digital I/O | 16 inputs / 8 outputs (optically isolated, 24 VDC) |
| Analog I/O | 2 analog inputs (0-10V, 16-bit), 2 analog outputs (0-10V, 16-bit) |
| Communication | EtherCAT (primary), PROFINET RT, EtherNet/IP, Modbus TCP/RTU, USB (service) |
| Operating Temperature | 0°C to +45°C (derate above 40°C) |
| Cooling | Forced air (internal fan) |
| IP Rating | IP20 (chassis mount, requires enclosure for NEMA/IP rating) |
| Dimensions (W x H x D) | ~140 x 240 x 190 mm (with heatsink) |
| Weight | ~3.2 kg (drive only) |
| Safety Certifications | UL 508C, CE, cULus (with appropriate options) |
| Functional Safety | SIL 2 / PL c capable (with safety option card) |
Configuration Code (ICA) Breakdown:
| Code Segment | Meaning |
|---|---|
| I | Input configuration: includes EtherCAT + analog + digital I/O |
| C | Communication: EtherCAT primary, Modbus secondary |
| A | Feedback: Sin/Cos encoder + resolver (dual feedback support) |
Control Modes:
- Position Mode: EtherCAT CiA 402, Pulse/Direction, Analog
- Velocity Mode: Analog ±10V, EtherCAT
- Torque Mode: Analog ±10V, EtherCAT
- Cyclic Synchronous Position (CSP): EtherCAT
- Cyclic Synchronous Velocity (CSV): EtherCAT
- Cyclic Synchronous Torque (CST): EtherCAT
- Homing: Multi-step homing with index search
Advanced Features:
- Auto-tuning with inertia identification
- Notch filters (up to 4 biquad filters) for vibration suppression
- Friction compensation
- Feedforward control (velocity, acceleration, torque)
- Electronic gearing (up to 32:1 ratio)
- Camming (up to 16 cam profiles)
- Programmable trajectory generator (S-curve, trapezoidal)
Advantages:
- Highest performance in the AKD family for 12A/600V applications
- Multi-protocol communication: EtherCAT + PROFINET + EtherNet/IP in one drive
- Dual feedback support (encoder + resolver) for redundancy
- Functional safety capable (SIL2/PLc)
- Extensive tuning tools via Kollmorgen Workbench software
Applicable Industries:
- CNC machining centers
- Robotics (6-axis and SCARA)
- Printing and converting
- Metal forming and stamping
- Wind turbine pitch and yaw
- Oil and gas (downhole and surface)
Installation Requirements:
- Panel or DIN rail mounting with minimum 100 mm clearance on top for airflow
- Bus capacitor required: minimum 1,000 µF per 10 A (1,200 µF minimum for this drive)
- Ground fault protection required on DC bus
- Shielded cables for encoder: maximum 15 m for sin/cos, 50 m for resolver (ASI)
- Earth ground: <1 Ω to panel ground
Usage Notes:
- Bus voltage must not exceed 600 VDC under any condition
- Continuous current derating: 100% at 25°C, 90% at 35°C, 70% at 45°C
- EtherCAT requires dedicated EtherCAT master (PLC or motion controller)
- Use Kollmorgen AKD Workbench for commissioning and tuning










{kind=link}
{kind=link}