.jpg "S61000(2)")

Digital guide
You are here:
- Home
- Kollmorgen
- Kollmorgen MMC-SD-1.0-230-D
Kollmorgen MMC-SD-1.0-230-D
Product Introduction
Standalone single-axis intelligent servo drive integrated with motion control CPU, independent closed-loop operation without external PLC controller. Native support sinusoidal three-phase PMSM driving, embedded full digital triple-loop regulator for position, speed and current control. Manufactured in USA for low-to-medium power precision automation equipment.
Detailed content
Technical Specifications
- Electrical Input Specs
- Nominal Input Voltage: 100–240 VAC Single-Phase, 50/60 Hz
- Control Auxiliary Power: 20–30 VDC, rated draw 250 mA
- Nominal Input Apparent Power: 2.0 kVA
- Inrush Current Peak: 70 A
- Internal DC Bus Capacitance: 1880 μF
- Output Power Specs
- Continuous Output Current: 5 Arms
- Peak Output Current: 15 Arms (2-second sustainable)
- Rated Drive Power Output: 1.0 kW
- Control Loop Refresh Rate
- Digital PI Current Regulator: 125 μs
- Digital PID Speed Regulator: 250 μs
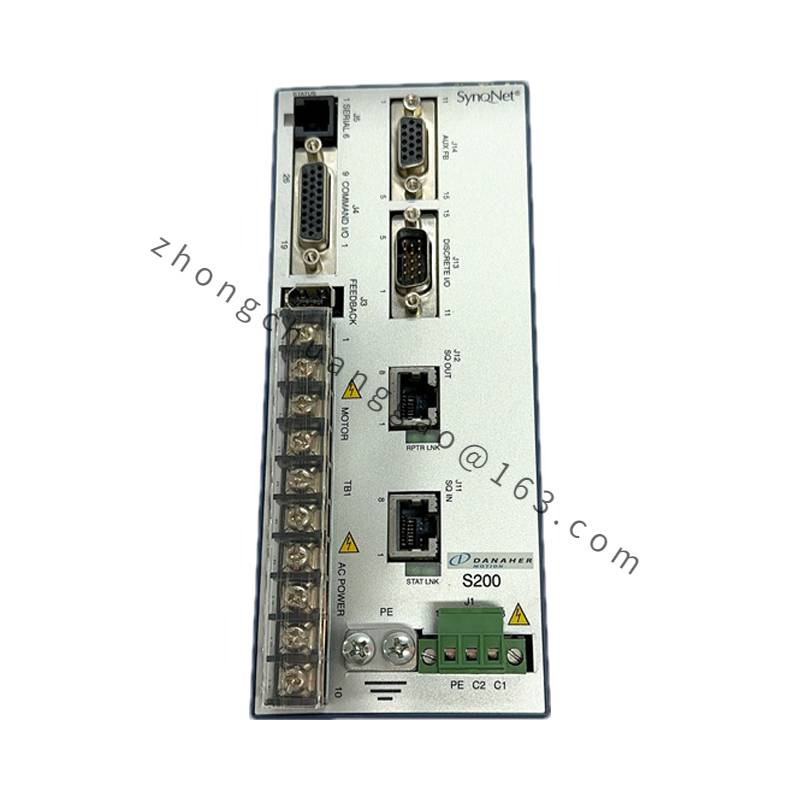
- Feedback Interface Hardware
- Maxim 3098A Quad Differential RS422 Encoder Receiver
- Support Differential Orthogonal Incremental Encoder Signals
- Physical & Weight Specs
- Net Weight: 2.5 kg (5.6 lbs)
- Terminal Screw Tightening Torque Max: 1.17 N·m (10.4 in-lb)
Functional Features
- 32-bit RISC Main CPU + Dedicated Digital Motion Co-processor; user-upgradeable flash firmware
- Onboard BR2032 3V lithium backup coin cell for position memory retention during power loss
- 13-channel isolated digital input, 4-channel isolated digital output universal I/O terminal block
- Multi-stage hardware fault diagnosis LED indicators: Green power status LED, Yellow diagnostic alarm LED
- Full digital three closed-loop control: current loop, speed loop, position loop with independent PID parameter tuning
- Built-in sinusoidal PWM three-phase power modulation, low motor torque ripple
- Support standalone motion programming, electronic gearing, point-to-point positioning, continuous velocity profile operation
Performance Highlights
- Independent motion execution without upper motion controller, reducing system hardware cost
- Ultra-fast current loop response eliminates low-speed motor cogging vibration
- Full digital regulator with zero analog drift, long-term positioning stability without periodic calibration
- Wide universal AC input voltage range compatible with global factory power grids
- Isolated I/O circuit eliminates industrial field EMC interference
Material Composition
- Housing Shell: Cold-rolled galvanized steel with anti-corrosion passivation coating
- Internal Power Module: Silicon IGBT power switching chip, aluminum alloy heat sink with fin structure
- Control Board: FR-4 high Tg flame-retardant PCB, gold-plated signal contact pins
- Wiring Terminals: Copper alloy with nickel plating, high-temperature PA66 insulating plastic
Structural Characteristics
- Vertical panel wall-mounted standard structure with integrated mounting lugs on both side edges
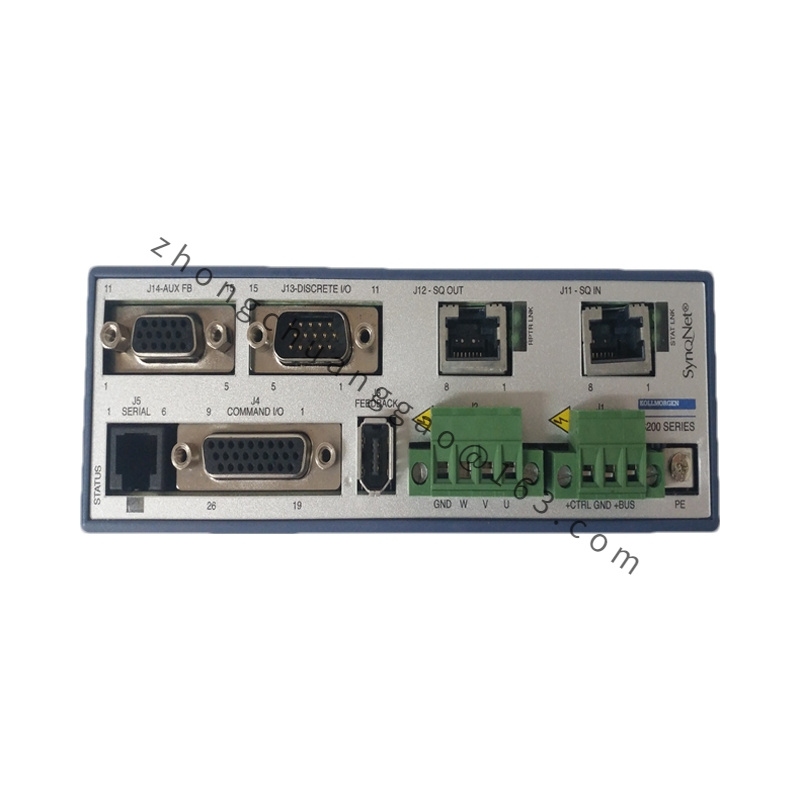
- Separated power wiring zone and signal wiring zone with physical isolation barrier to avoid cross-interference
- Front panel centralized terminal layout for power supply, motor cable, encoder cable, I/O signal wiring
- Top passive natural convection heat dissipation air channel, no built-in cooling fan
- Compact integrated single-box design combining power drive layer and motion control layer
Working Principle
AC mains input is rectified to DC bus voltage via internal diode bridge rectifier; 32-bit motion CPU receives motion commands from I/O or onboard program memory, calculates real-time current reference value through triple-loop PID algorithm, outputs PWM signal to drive IGBT power stage to generate three-phase sinusoidal current for permanent magnet servo motor. RS422 differential encoder feeds real-time rotor position/speed signal back to co-processor to form closed-loop feedback regulation, realizing fully automatic position, speed and torque adjustment. Backup lithium battery stores zero-point position data during power outage.
Applicable Industries
Small automated assembly equipment, desktop precision positioning platforms, lab test automation instruments, textile small processing machinery, packaging mini-conveying axes, medical automated diagnostic equipment, electronic component pick-and-place small gantry axes
Installation Requirements
- Mount vertically on flat metal cabinet panel; minimum clearance top ≥ 80 mm, bottom ≥ 80 mm, left/right ≥ 50 mm for heat dissipation
- Install power line EMI filter on AC input terminal; separate power cable and encoder signal cable routing with metal shielding trunking
- Enforce single-point grounding of drive shell to cabinet protective earth with 4 mm² copper ground wire
- Operating ambient temperature range: 0°C to +40°C; ambient humidity ≤ 90% RH non-condensing
- Installation altitude limit: ≤ 1000 m above sea level; derate output power 6% per additional 1000 m altitude
Usage Precautions
- Do not apply 3-phase 380/480 VAC high voltage to single-phase input terminal; permanent power module damage occurs
- Replace BR2032 lithium backup cell every 5 years; power off equipment before battery replacement to avoid memory data loss
- Tighten all wiring terminals to specified torque value; loose terminals cause overheating and burnout faults
- Do not operate under condensation, corrosive gas or conductive dust environment
- Complete full parameter auto-tuning after first-time motor wiring modification to prevent oscillation or overcurrent alarm
- Store spare unit in dry sealed packaging with desiccant; storage temperature -20°C ~ +60°C

.jpg)






{kind=link}
{kind=link}