")

Digital guide
You are here:
- Home
- Kollmorgen
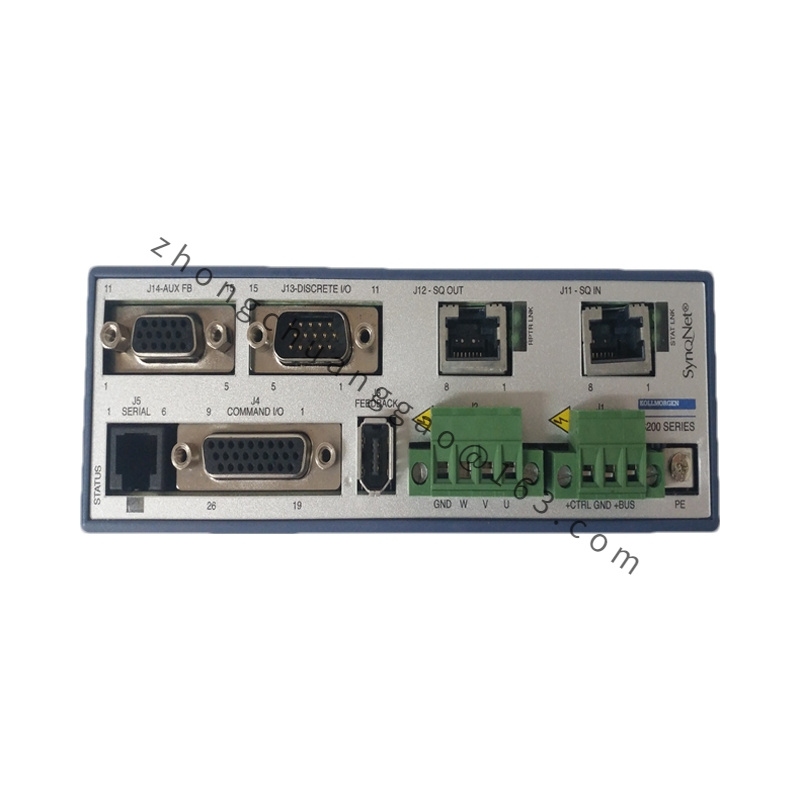
- Kollmorgen AKD-P02406-NAA
Kollmorgen AKD-P02406-NAA
Product Series: AKD-P Series — Programmable Multi-Axis Servo Drive
Product Introduction:
The AKD-P02406-NAA is a high-performance programmable servo drive from Kollmorgen’s AKD-P product family. It is a 6-axis drive with 24A continuous current per axis, designed for complex multi-axis motion control systems. The “NAA” suffix denotes a standard configuration without option cards. The drive features EtherCAT communication and advanced S-curve motion profiling.
Detailed content
Model Designation Breakdown:
- AKD = AKD Series (Advanced Kinetic Drive)
- P = Programmable (firmware-configurable, multi-axis)
- 024 = 24A continuous current per axis
- 06 = 6 axes
- NAA = No option cards, standard configuration
Technical Specifications:
| Parameter | Value |
|---|---|
| Drive Type | Digital Servo Drive (Sinusoidal Commutation) |
| Number of Axes | 6 |
| Continuous Current (per axis) | 24 A RMS |
| Peak Current (per axis) | 72 A (3×, 10s) |
| Bus Voltage | 480 VDC (nominal), 360–650 VDC range |
| Power Rating (per axis) | ~5.5 kW (at 480VDC) |
| Total Power (6-axis) | ~33 kW |
| Communication | EtherCAT (primary), USB, RS-232 |
| Motion Profiles | S-Curve, Trapezoidal, Point-to-Point, CSP, CST, Electronic Cam |
| Encoder Input | BiSS-C, EnDat 2.2, Hiperface, Sin/Cos, SSI |
| Safety Functions | STO, SS1, SLS, SLP (SIL3 / PL e via option) |
| I/O | 24× Digital I/O, 4× Analog I/O (standard) |
| Protection Class | IP20 (cabinet mounting) |
| Cooling | Forced air (internal fan) |
| Dimensions (approx.) | 280mm × 150mm × 220mm (W×H×D) |
| Weight (approx.) | 4.5 kg |
Material Composition:
- Power Stage: IGBT modules (6th generation, low switching loss)
- DC Bus Capacitors: Film capacitors (high ripple current rating)
- Control Board: Multi-layer PCB, conformal coated
- Heat Sink: Extruded aluminum with forced-air fan
- Enclosure: Steel sheet, powder-coated (RAL 7035)
- Connectors: Phoenix Contact / Wago spring terminals
Structural Features:
- 6 independent servo channels in one drive chassis
- Shared DC bus — regenerative energy sharing between axes
- EtherCAT slave port — cycle time 125μs to 1ms
- Option card slots — 2× (NAA = empty)
- Built-in braking resistor connection — 50Ω / 1kW (internal or external)
- LED status indicators — per axis + system status
Working Principle:
The AKD-P02406-NAA receives a position/velocity/torque command from the motion controller via EtherCAT. The internal DSP (digital signal processor) runs a triple-loop control algorithm: current loop (62.5μs) → velocity loop (250μs) → position loop (1ms). The IGBT power stage converts DC bus voltage into three-phase sinusoidal PWM outputs to the motor. The encoder feedback closes the position loop. The S-curve profiler generates jerk-limited trajectories for smooth motion. Regenerative energy from decelerating axes is fed back to the DC bus and dissipated via the braking resistor.
Key Advantages:
- 6 axes in one drive — reduces cabinet space by 70% vs. 6 single-axis drives
- Shared DC bus — energy regeneration between axes saves up to 30% power
- EtherCAT — deterministic, high-speed communication
- S-curve profiling — eliminates mechanical shock and vibration
- Programmable — firmware configurable for different motion applications
- SIL3 safety ready — with option card
Applicable Industries:
- Multi-Axis CNC Machines (5-axis + tool changer)
- Packaging Machines (multi-lane sync)
- Printing Presses (web tension + registration)
- Robot Arms (6-axis coordinated motion)
- Textile Machinery (warping, weaving)
Installation Requirements:
- Mount in control cabinet — DIN rail or screw mounting, min. 50mm clearance on all sides
- DC bus wiring: 480VDC, 6mm² copper minimum, fused at 40A per axis equivalent
- EtherCAT: Use shielded CAT5e/CAT6 cable, daisy-chain topology, max 100m total
- Motor cables: Kollmorgen shielded servo cables, max 20m (use active extension for longer)
- Grounding: PE connection < 0.1 Ω, star-point ground topology
- Cooling: Ensure cabinet airflow > 20 CFM across drive
Usage Precautions:
- Do not exceed 650 VDC bus voltage — IGBT destruction
- Do not short motor phases — will destroy IGBTs instantly
- Braking resistor must be connected during deceleration — overvoltage fault without it
- Firmware updates only via Kollmorgen AKD Workbench — do not use unauthorized tools
- Ambient temp in cabinet: Max 45°C — derate current 1.5%/°C above 40°C


.jpg)







{kind=link}
{kind=link}