")

Digital guide
You are here:
- Home
- Kollmorgen
- Kollmorgen AKD-P01206-NCEA
Kollmorgen AKD-P01206-NCEA
Product Series
AKD Compact Ethernet Servo Drive 12A Continuous Low-Voltage Variant
Product Brief
12A continuous current single/three-phase 120–240VAC servo drive, NCEA suffix = EtherCAT native communication, Analog ±10V velocity/torque command interface, fanless passive cooling for compact low-power multi-axis positioning equipment.
Detailed content
Technical Specifications
- Rated Input Voltage: 1/3×85–265 VAC (nominal 220V low-voltage industrial grid)
- Continuous Output Current Per Phase: 12 A RMS
- Peak Overload Output Current: 36 A RMS (3× continuous, 500ms duty cycle)
- Rated Continuous Output Power: 4000 W
- Control Auxiliary Supply: 24 VDC ±10%, 100 W power draw
- Communication Code NCEA Breakdown:
- NC = Standard base hardware platform
- E = EtherCAT real-time industrial Ethernet primary bus
- A = Analog ±10V differential command input interface
- Supported Feedback Types: SFD single-cable encoder, EnDat, BiSS, Resolver, Hiperface DSL
- Control Modes: Position closed-loop, velocity closed-loop, torque closed-loop, electronic gearing, cam profiling
- Digital I/O Channels: 8 opto-isolated digital inputs, 4 open-collector digital outputs
- Analog Command Interface: 2-channel ±10V differential analog input for external analog torque/velocity setpoints
- Safety Function: STO Safe Torque Off (SIL 2 / PL c)
- Protection Mechanisms: Overvoltage, undervoltage, phase loss, short-circuit, IGBT overheat, motor thermal cutout stall protection
- Cooling Type: Passive natural convection fanless design
- Enclosure Rating: IP20 cabinet-only installation
- Operating Ambient Temperature: 0°C to +45°C (power derate above 45°C)
Function Features
- Dual command interface support: EtherCAT digital bus + analog ±10V external analog controller compatibility
- Full auto motor parameter identification and one-click system gain auto-tuning via WorkBench software
- Onboard motion trajectory generator eliminates PLC position profile calculation load
- Single hybrid cable compatibility with all Kollmorgen AKM low-voltage servo motor series
- Real-time fault event logging with millisecond timestamp for equipment diagnostic analysis
Performance Highlights
- Current loop refresh rate 0.68 μs, closed-loop bandwidth up to 5 kHz
- Maximum supported feedback resolution 27-bit absolute multi-turn encoder
- EtherCAT bus multi-axis synchronization jitter ≤ 1 μs for synchronized gantry motion
- Torque step response rise time ≤ 25 μs under full load step disturbance
Material Composition
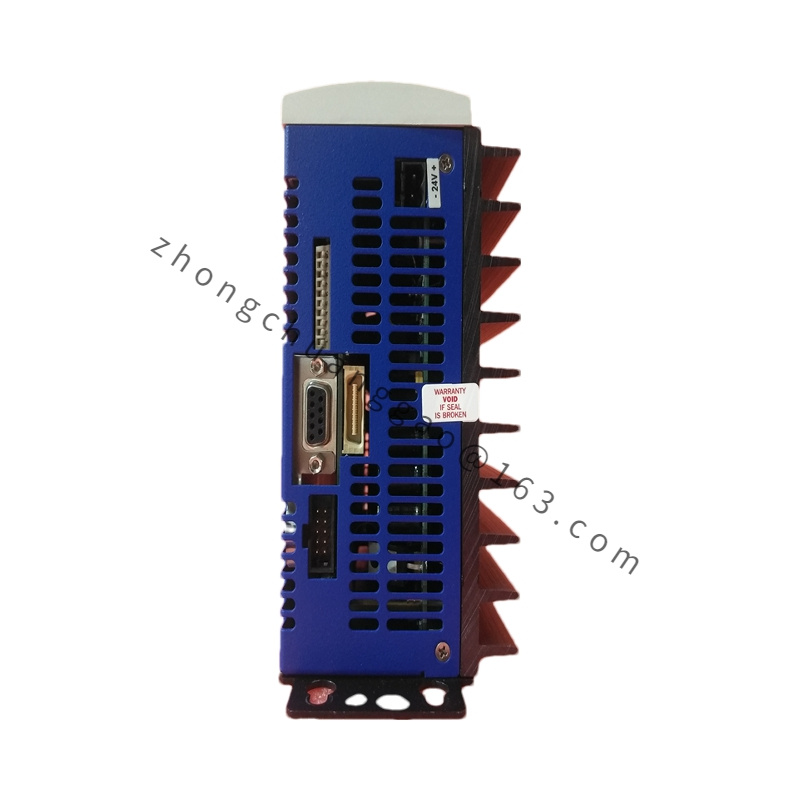
- Integrated Housing & Heat Sink: Extruded black anodized aluminum alloy monolithic structure
- Power PCB: Aluminum substrate high-temperature FR4 printed circuit board
- Power Semiconductors: Low-loss silicon IGBT power modules with integrated thermal NTC sensors
- Terminal Blocks: Nickel-plated copper conductive pins, flame-retardant PA66 plastic housing
Structural Characteristics
- Slim vertical DIN rail mount form factor, 60 mm cabinet width
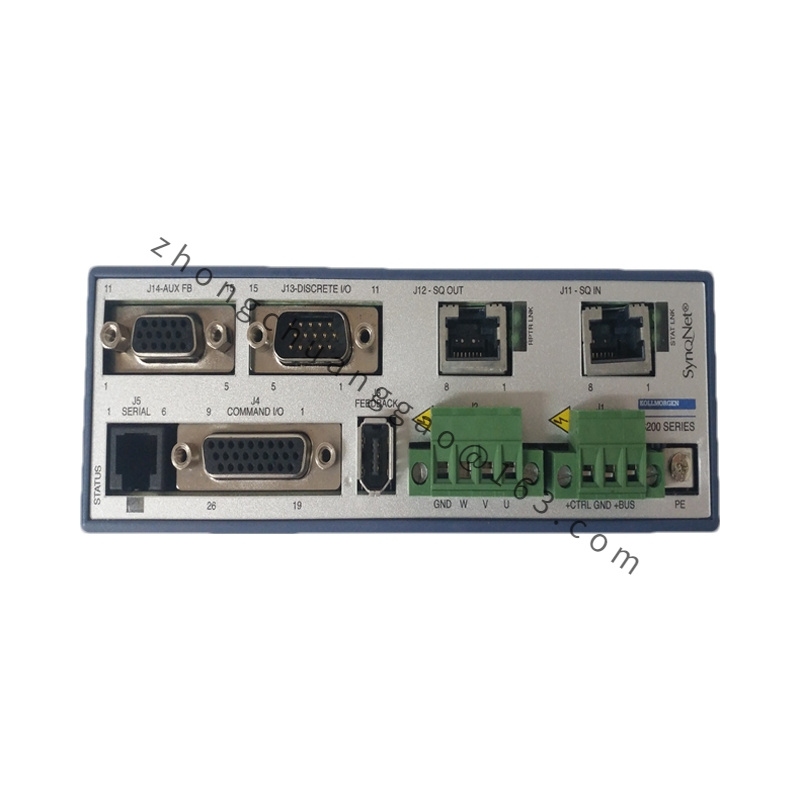
- All signal, power, analog command terminals located on front wiring panel
- Vertical finned integrated heat sink eliminates external cooling hardware
- Physical isolation barrier separating high-voltage power zone and low-voltage analog signal zone
- Lockable screw terminal connectors resist vibration-induced wiring loosening
Working Principle
Single/three-phase 220VAC grid input rectified to low-voltage DC bus rail; dual 32-bit DSP control unit processes either EtherCAT digital motion commands or external ±10V analog velocity/torque setpoint signals, reads motor position feedback data, and generates high-speed PWM gate signals to drive IGBT inverter stage. Inverter outputs variable-frequency three-phase sine wave to drive low-voltage AKM synchronous servo motors, executing full vector closed-loop motion regulation with built-in regenerative braking circuit for deceleration energy absorption.
Advantage Highlights
- Dual analog + EtherCAT interface enables seamless migration from legacy analog motion control systems to digital EtherCAT network architecture
- Fanless passive cooling removes fan maintenance failure points and cabinet dust accumulation risks
- High 12A continuous current rating supports medium-torque low-voltage servo motor applications
- Compact monolithic aluminum heat sink reduces cabinet installation footprint by 35% vs legacy drive platforms
- UL, CE, RoHS global certification for small OEM machine export compliance
Applicable Industries
Electronics assembly equipment, laser marking processing machines, laboratory precision positioning stages, textile small looms, medical automation devices, desktop CNC engraving machines
Installation Requirements
- Mount vertically on standard 35 mm DIN rail inside IP54+ sealed electrical cabinet
- Maintain minimum 80 mm vertical unobstructed clearance above and below drive heat sink
- Separate analog command signal wiring from high-current servo power cables by minimum 150 mm distance
- Connect dedicated PE protective earth wire (4mm² copper) to chassis ground terminal
- Analog ±10V command wiring must use fully shielded twisted pair signal cable
Operation Precautions
- Do not operate with input supply voltage below 85VAC or above 265VAC single/three-phase
- Avoid installation in cabinet environments with high oil mist or conductive metal dust
- Prevent direct solar radiant heat exposure to aluminum heat sink surface
- Disconnect main AC power supply before modifying analog command or motor feedback wiring
- Allow 4-minute DC bus discharge period post power-off before accessing drive internal circuitry








{kind=link}
{kind=link}