")
")

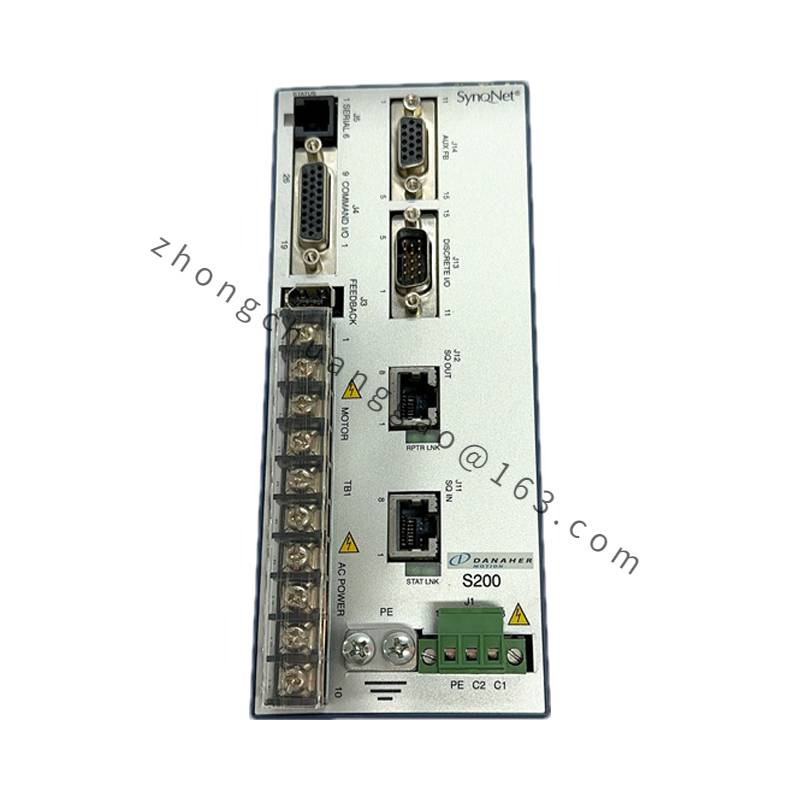
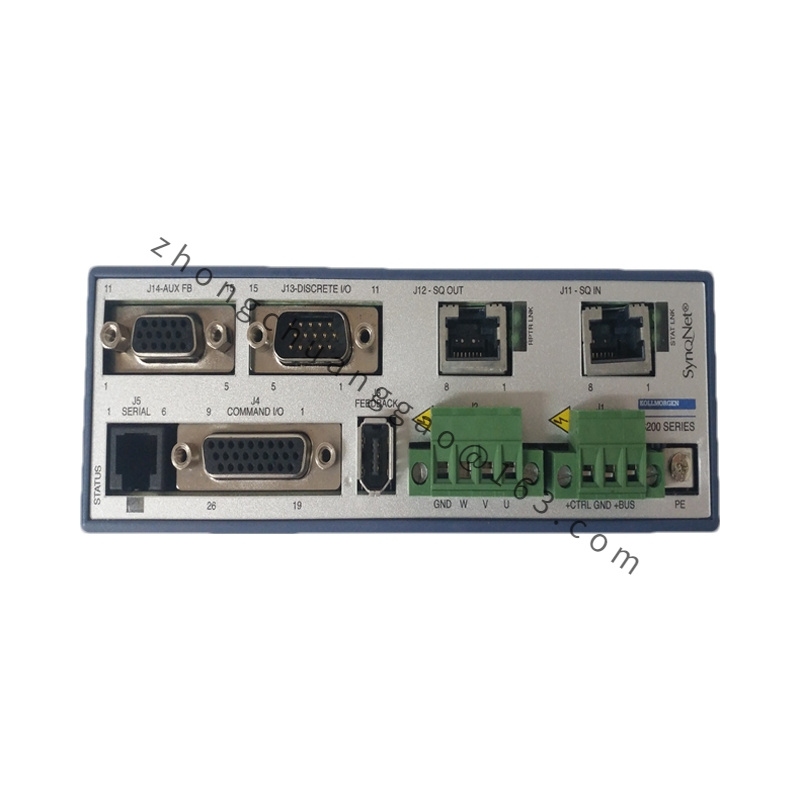
Product Overview:
The AKD-B01206-NBS is a single-axis servo drive from Kollmorgen’s AKD-B product line. The “01206” indicates a 12A continuous current rating (6A RMS per phase in 3-phase configuration). The “NBS” suffix indicates a North American variant with EtherCAT and CANopen support, basic firmware (no motion controller), and specific connector configuration.
Technical Specifications:
| Parameter | Value |
|---|---|
| Continuous Output Current | 6 A RMS per phase (12A total system) |
| Peak Output Current | 18 A (3x continuous) |
| Bus Voltage | 48 VDC (nominal) / 80 VDC max |
| Supply Voltage Range | 24–80 VDC |
| Feedback Types | EnDat 2.2, Hiperface DSL, BiSS-C, Sincos/Cos, Hall |
| Communication | EtherCAT, CANopen, RS-232 |
| Control Modes | Cyclic Synchronous Position (CSP), Cyclic Synchronous Velocity (CSV), Cyclic Synchronous Torque (CST), Profile Velocity, Profile Position, Profile Torque, Homing |
| Motion Controller | Basic — limited segment buffer (external controller recommended for complex profiles) |
| Axes | 1 axis |
| Enclosure Rating | IP20 (chassis mount) |
| Operating Temperature | 0°C to +50°C |
| Weight (approx.) | ~0.5 kg |
Functional Features:
Advantages:
Applicable Industries:
Conveyor systems, material handling, textile machines,印刷 (printing), food & beverage packaging, woodworking
Series: AKD-B (Basic — drive-only, no motion controller)
Installation Requirements:
Usage Notes:








{kind=link}
{kind=link}