

Technical Specifications:
| Parameter | Value |
|---|---|
| Encoder Type | Incremental Optical |
| Resolution (Standard) | 1280 PPR (5120 Edges ×4) |
| Resolution (Optional) | 2500 PPR (10000 Edges ×4) |
| Output Signal A | HTL (Line Driver), 5 V DC |
| Output Signal B | HTL (Line Driver), 5 V DC |
| Zero Pulse (Z) | 1 Pulse Per Revolution, HTL |
| Supply Voltage | 5 V DC ±5% (Typical 4.75 V to 5.25 V) |
| Maximum Output Frequency | 500 kHz |
| Operating Temperature | -20°C to +85°C |
| Protection Rating | IP67 (Connector Side) |
| Cable Length (Standard) | 3 m (Shielded Twisted Pair) |
| Weight | Approximately 0.15 kg (Encoder Unit Only) |
Functional Features:
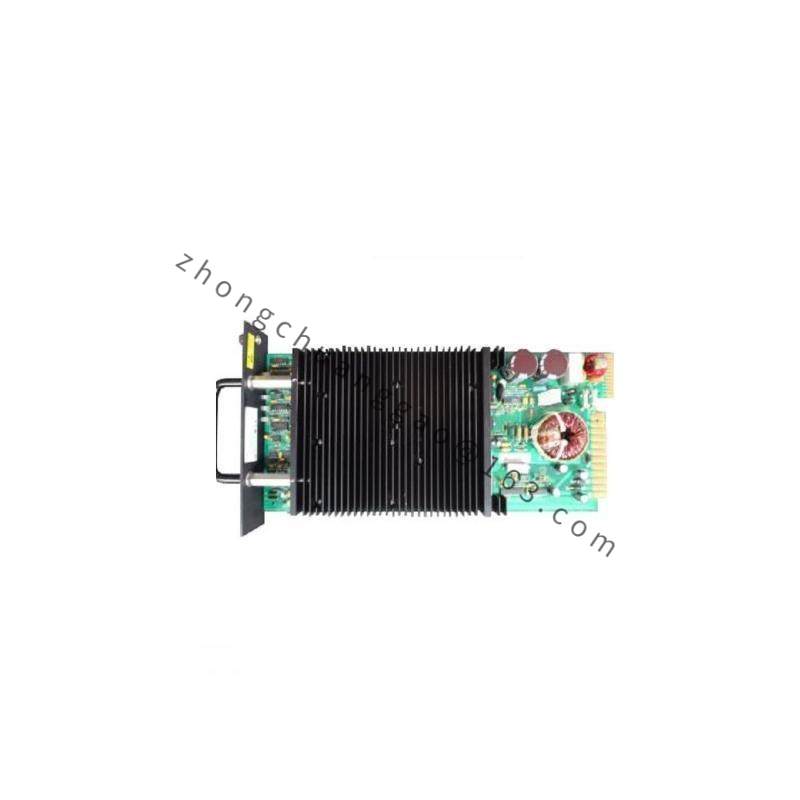
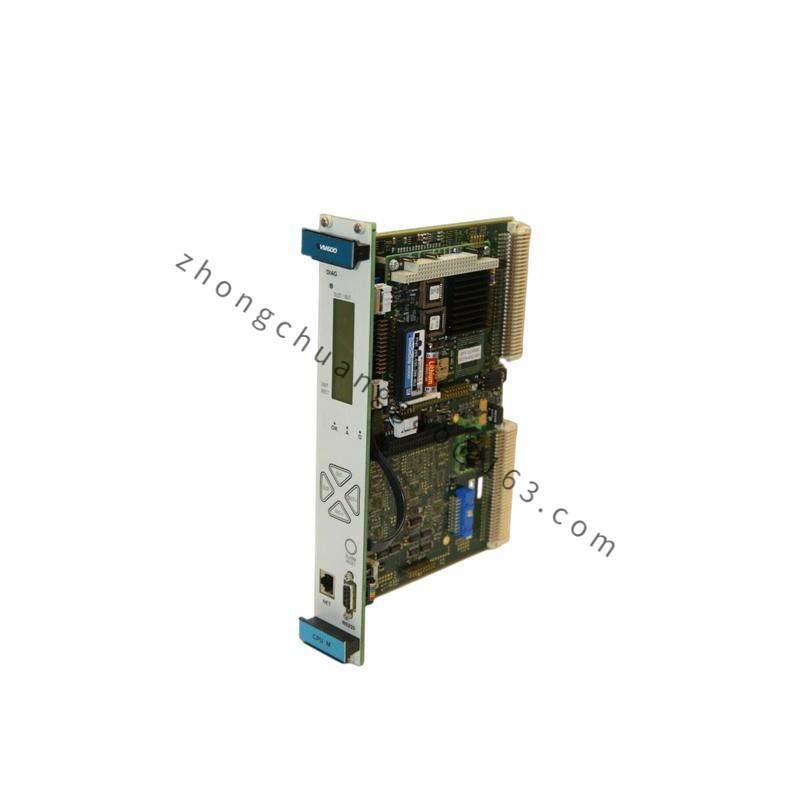
Structure & Material Composition:
Working Principle:
The optical encoder disk is mounted on the motor shaft and rotates synchronously with the rotor. An LED emits light through a coded glass scale, and a photodiode array detects the light/dark pattern, generating quadrature square wave signals (A and B) with a 90° phase shift. The Z pulse provides one index pulse per revolution for reference positioning. The servo drive counts these pulses to calculate real-time position and derives speed via frequency measurement, enabling closed-loop servo control.
Applicable Industries:
Installation Requirements:
Usage Precautions:







{kind=link}
{kind=link}